Lilian Fautrelle
INSERM ToNIC (UMR 1214)
lilian.fautrelle@inserm.fr ; lilian.fautrelle@univ-jfc.fr
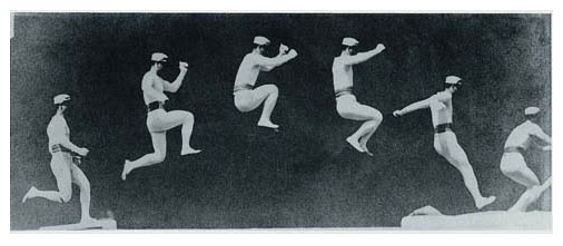
Chronophotographie d’EJ Marey
C’est à la fin du XIXème siècle, sous l’impulsion d’Etienne Jules Marey et d’Edward Muybridge, qu’apparaissent les premiers procédés destinés à l’enregistrement du mouvement. Plus particulièrement, les chronophotographies, succession de photographies à intervalle de temps régulier sur un même support fixe, sont considérées comme les premières captures du mouvement (photo ci-dessus.
De nos jours, la capture cinématique (ou MOCAP, i.e. « Motion Capture ») se fait à l’aide de nouvelles technologies mais le principe fondamental reste inchangé. Il s’agit de déterminer successivement, avec une fréquence d’enregistrement connue, les positions d’un ou plusieurs points dans l’espace. L’étude de l’évolution de la position de ces points dans un repère espace/temps est appelée analyse cinématique.
Les systèmes de MOCAP 3D passifs sont composés de caméras émettant un rayonnement infrarouge, de marqueurs optiques catadioptriques passifs, et d’un logiciel informatique chargé des reconstructions spatiales. Les caméras sont généralement de résolutions pouvant s’étendre de 1 à 16 millions de pixels avec une capacité de fréquences d’enregistrements de 100 à 2000 hertz. Elles sont dotées en plus d’une couronne d’émetteurs infrarouges hautes fréquences (voir Figure 2). Ces rayons infrarouges seront réfléchis par les marqueurs passifs catadioptriques en direction de la source d’émission, c’est-à-dire la caméra. Les marqueurs sont donc ainsi détectés par les caméras. Chaque caméra enregistre la position de tous les marqueurs qu’elle détecte dans son propre référentiel. La transformation de la position de chaque point du référentiel ‘caméra’ au référentiel ‘volume spatial de travail’ (i.e. référentiel galiléen) nécessite des processus de calculs et triangulations assurés par le logiciel du dispositif. Pour une bonne reconstruction de la position du marqueur dans l’espace en 3 dimensions, un marqueur doit être perçu par au moins deux caméras.
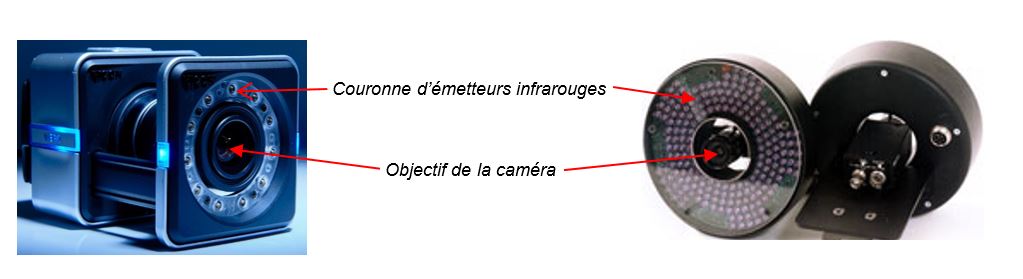
Fig2. Photographie d’une caméra composant à gauche le système VICON (modèle VERO V16) et à droite le système SMART.
Le principe de la capture cinématique les systèmes de MOCAP passifs consiste à enregistrer dans un référentiel spatial et temporel clairement défini, le mouvement d’un sujet d’étude. Pour cela, le sujet d’étude est équipé de marqueurs réfléchissants détectés par les caméras du système (voir paragraphe précédent et Figure 3). Ce sont les positions successives de ces marqueurs dans l’espace défini et dans le temps que nous récupèrerons en sortie d’acquisitions. Par conséquent, la calibration du référentiel spatial, la définition de la fréquence d’acquisition, et le positionnement de nos marqueurs sur le sujet d’étude sont des étapes primordiales pour obtenir des enregistrements de qualité.
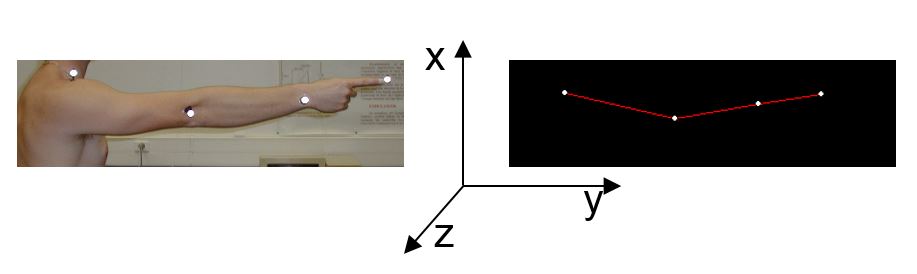
Fig3. Illustration d’enregistrement cinématique avec le système SMART. Dans ce cas, l’objectif est d’enregistrer un mouvement de pointage du membre supérieur chez un homme adulte. A gauche, le bras du sujet est équipé de marqueurs réfléchissants de manière à obtenir une modélisation du membre supérieur par un squelette fil de fer. Pour ce faire, les marqueurs sont disposés sur les articulations du sujet. A droite, visualisation de l’enregistrement reconstruit. Chaque segment corporel du membre supérieur (bras, avant bras, main) est modélisé par un segment rigide délimité de part et d’autre par une articulation (épaule, coude, poignet, et phalange distale de l’index).
L’objectif de l’enregistrement cinématique est de pouvoir caractériser de manière quantitative un mouvement. A l’aide des lois de la géométrie analytique, il est en effet possible, à partir d’une acquisition cinématique, de calculer un grand nombre de paramètres caractérisant le mouvement enregistré. Les plus courants sont en général la trajectoire d’un point (forme, distance, rayon de courbure), sa vitesse (instantanée, moyenne), et son accélération.
L’utilisation de tels outils trouve un champ d’application très large. En recherche (neurosciences, neurophysiologie), ils sont couramment utilisés pour appréhender les mécanismes du contrôle moteur chez l’homme. Ils trouvent également d’autres utilisations en diagnostic clinique et réadaptation fonctionnelle, en physiologie et performance du sport ou encore en robotique.
Remarque : Ces systèmes de MOCAP passifs peuvent être couplés et synchronisés avec d’autres appareils d’enregistrements biométriques numériques ou analogiques tel que des plateformes de force, des capteurs de pressions, ou de l’électromyographie de surface par exemple.
MATERIEL REQUIS
- Un volume libre adapté au mouvement que l’on souhaite enregistrer (dans le cas de l’étude de la motricité humaine, il est utile de disposer d’une salle spécifiquement allouée à ce type d’enregistrement.)
- Adhésif double face (pour fixer les marqueurs sur le sujet d’étude.)
- Rasoirs (pour raser la peau et faciliter la mise en place et la bonne tenue des marqueurs sur un sujet d’étude humain)
- Un système de MOCAP complet :
- Logiciel/Software
- Caméras (3 minimums)
- Marqueurs
- Kit de calibration
- Un ordinateur à la configuration adaptée
ETAPES
- Disposer les caméras en vérifiant que le volume spatial nécessaire à la réalisation du mouvement est intégralement couvert par les champs des caméras.
- S’assurer que chaque caméra ne détecte aucun artefact parasite pouvant être considéré à tort par le système comme un marqueur (on parle alors de « marqueurs fantômes » : le système détecte une réflexion infrarouge et le considère comme un marqueur qui n’existe pas).
- Effectuer la calibration du système avec le kit de calibration adéquat. ATTENTION, à partir du moment où la calibration est effectuée avec succès, le moindre mouvement d’une des caméras faussera cette calibration, et donc les données recueillies.
- Equiper le sujet avec les marqueurs réfléchissants selon le modèle désiré pour l’étude.
- Pour les systèmes récents dotés de l’option « modelling » a priori, créer ou charger le modèle théorique désiré, puis vérifier et approuver le lien entre le modèle théorique et le modèle détecté en direct par le système d’acquisition.
- Vérifier que lors de la réalisation du mouvement type à enregistrer, aucun marqueur à aucun moment n’est perdu par le système.
- Procéder aux acquisitions cinématiques.
- Pour les systèmes plus anciens dotés d’un « modelling » a posteriori, Créer le modèle en définissant les marqueurs utilisés sur le logiciel de reconstruction.
- Procéder à l’étape de labélisation et reconstruction : elle peut être automatique (pour les systèmes récents) ou manuelle (pour les systèmes plus anciens). Dans ce dernier cas, pour chaque essai enregistré, définir chaque point de manière à reconstruire sur chaque enregistrement, le modèle créé à l’étape précédente : c’est l’étape de « tracking ».
- Exporter les enregistrements dans le/les formats désiré(s) (.mat, .xls, .c3d, etc) afin de traiter les données cinématiques des mouvements enregistrés.
Interprétations des résultats et analyse
Les données recueillies sont les positions de tous les marqueurs sur les trois axes x, y et z en fonction du temps.
Exemple pratique:
- fréquence d’enregistrement de 120 Hz, i.e. 120 mesures par seconde
- modèle à deux marqueurs
- acquisition d’enregistrement de 2 secondes.
Le tableau de sortie comportera 6 colonnes, (i.e. les axes x, y et z pour chacun des 2 marqueurs) et 240 lignes (i.e. la position sur les 3 axes pour les deux marqueurs 120 fois par seconde).
A partir de ce tableau, une multitude d’analyses mettant en œuvre les lois mathématiques de la géométrie analytique (trajectoire, vitesse, accélération, décélération, etc) sont alors envisageables en fonction des hypothèses de départ et des paramètres d’intérêts.
Mots-clés
Neurosciences, Motion Capture, capture du mouvement, caméra, cinématique
Références
An KN, Chao EY (1984) Kinematic analysis of human movement. Ann Biomed Eng. 1984;12(6):585-97.
Bober T (1985) Biomechanika chodu i biegu. Studia i materiały AWF we Wrocławiu, Wrocław.
Kadaba M, Ramakrishnan H, Wootten M, Gainey J, Gorton G, Cochran G (1989) Repeatability of kinematic, kinetic, and electromyographic data in normal adult gait. Journal of Orthopaedic Research 7(6) 849-860.
Macmillan DL (1963) A physiological analysis of walking in the American lobster (Homarus americanus) Philos Trans R Soc Lond B Biol Sci. 6;270(901):1-59
Tabakin D Vaughan CL (2000) A comparison of 3D gait models based on the Helen Hayes marker set. Proceedings of the Sixth International Symposium on the 3D Analysis of Human Movement Cape Town, South Africa, 98-101.
Winter DA (2005) Biomechanics and Motor Control of Human Movement. J Wiley & Sons, Hoboken NJ.
L’auteur du billet
 Lilian Fautrelle est MCU en STAPS (Neurosciences, Neurophysiologie) à l’INU-JFC d’Albi, affecté au campus de Rodez, et rattaché au laboratoire de recherche INSERM ToNIC (UMR 1214). Il étudie le contrôle du mouvement humain, et plus particulièrement ses propriétés de flexibilité et de plasticité face à différents contextes environnementaux, différents protocoles d’entrainements ou différentes pathologies.
Lilian Fautrelle est MCU en STAPS (Neurosciences, Neurophysiologie) à l’INU-JFC d’Albi, affecté au campus de Rodez, et rattaché au laboratoire de recherche INSERM ToNIC (UMR 1214). Il étudie le contrôle du mouvement humain, et plus particulièrement ses propriétés de flexibilité et de plasticité face à différents contextes environnementaux, différents protocoles d’entrainements ou différentes pathologies.
